โดย … ดร. วิบูลย์ ช่างเรือ
ภาควิชาวิศวกรรมเครื่องกล คณะวิศกรรมศาสตร์ มหาวิทยาลัยเชียงใหม่
การตรวจสอบผลผลิตโดยไม่ทำลายสำหรับสินค้าเกษตรในประเทศไทย มีงานศึกษาวิจัยกันมาแล้วเป็นจำนวนมาก ทั้งการศึกษาด้วยกระบวนการประมวลผลจากรูปภาพ (Image processing) การใช้เสียง (Acoustic) การใช้คลื่นอัลตร้าซาวด์ และการใช้คลื่นแม่เหล็กไฟฟ้าความถี่อินฟราเรดย่านใกล้ (Near Infrared Spectroscopy, NIRs) แต่การนำผลจากศึกษาในห้องปฏิบัติการไปใช้ในเชิงพาณิชย์ยังมีให้เห็นน้อย อย่างไรก็ตามมีภาคเอกชนบางรายที่มีการนำเข้าเครื่องจักรเพื่อการตรวจสอบผลผลิตเกษตรแบบไม่ทำลาย เข้ามาใช้ซึ่งเครื่องจักรมีราคาแพงมาก แสดงให้เห็นว่าถึงแม้เครื่องจักรมีราคาแพงแต่ถ้ามีความน่าเชื่อถือในการทำงาน ภาคเอกชนก็ยอมรับได้ที่จะซื้อมาไว้ใช้ และในบรรดาเทคโนโลยีของเครื่องจักรเพื่อการตรวจสอบผลผลิตเกษตรแบบไม่ทำลาย ที่มีการใช้ในต่างประเทศและที่นำเข้ามาใช้ในประเทศนั้น พบว่าการใช้คลื่นความถี่อินฟราเรดย่านใกล้ (Near Infrared Spectroscopy, NIRs) เป็นเทคโนโลยีที่ได้รับการยอมรับและมีการใช้เชิงพาณิชย์
ในบทความนี้จึงสนใจที่นำเสนอการออกแบบระบบคัดคุณภาพผลิตผลหลังการเก็บเกี่ยว โดยใช้คลื่นแม่เหล็กไฟฟ้าความถี่อินฟราเรดย่านใกล้ ((Near Infrared Spectroscopy, NIRs) ในการคัดแยกอาการส้มฟ่าม ซึ่งระบบนี้จะประกอบด้วยภาชนะบรรจุ (Container) ระบบลำเลียง (Conveyor system) ระบบตรวจสอบคุณภาพด้วย NIRs กลไกและ Software ควบคุมการทำงานของระบบลำเลียงส้มที่ผ่านการตรวจสอบคุณภาพแล้ว เพื่อการคัดเกรดของผลส้มหลังการเก็บเกี่ยว เพื่อเป็นทางเลือกให้กับเกษตรกรและผู้ประกอบการ ในการควบคุมคุณภาพของสินค้าเกษตร ให้ตรงกับความต้องการของตลาด เพิ่มศักยภาพการแข่งขันทั้งตลาดภายในประเทศและตลาดโลก ในการดำเนินงานเครื่องคัดแยกคุณภาพโดยใช้เทคนิคเนียร์อินฟราเรดสเปกโทรสโกปีนั้น มีองค์ประกอบหลักที่สำคัญ ดังนี้
การดำเนินงานโครงการพัฒนาเครื่องต้นแบบสำหรับคัดคุณภาพและอาการฟ่ามของผลส้มหลังการเก็บเกี่ยวนั้น องค์ประกอบที่สำคัญแต่ละส่วน มีความจำเป็นจำที่ต้องดำเนินงานควบคู่กันไปตลอดทั้งโครงการฯ เพื่อเป็นการพัฒนาและปรับปรุงการทำงานของเครื่องคัดแยก โดยการพัฒนาและทดสอบสมการเพื่อใช้ในการคัดแยก เพื่อนำไปพัฒนาโปรแกรมระบบการควบคุมในด้าน Software และ Hardware โดยการใช้สมการที่ได้จากการพัฒนา ซึ่งผลของการพัฒนาสมการเพื่อการตรวจประเมินนั้น วิธีการตรวจประเมินที่สามารถเก็บรวบรวมข้อมูลสเปกตรัมไปใช้ในการวิเคราะห์และคัดแยกที่ดีที่สุด จะถูกนำไปใช้ในการออกแบบเครื่องคัดแยกต้นแบบเช่นกัน เพื่อให้การดำเนินงานมีประสิทธิภาพมากที่สุด การพัฒนาการสร้างสมการ วิธีการในการเก็บข้อมูล และการออกแบบการตรวจวิเคราะห์ มีความจำเป็นที่จะต้องดำเนินการซ้ำไป ซ้ำมาเพื่อให้ได้ข้อมูลที่มีความแม่นยำสูง และสามารถนำไปใช้งานได้จริง สามารถแบ่งการทำงานได้ดังนี้
1.ออกแบบและพัฒนาเครื่องต้นแบบชุดตรวจวัด (NIR prototype)
นำข้อมูลจากการทดลองสามารถนำไปออกแบบและพัฒนาเครื่องต้นแบบ (NIR prototype) โดยการออกแบบวิธีการเก็บข้อมูลเพื่อใช้ในการประเมินคุณภาพผลิตผล โดยใช้ชุดเครื่องมือต้นแบบในการเก็บข้อมูลสเปกตรัม โดยการออกแบบการเก็บสเปกตรัมในระบบ interactance และสามารถปรับเป็น reflectance ได้ เพื่อให้สามารถใช้งานได้หลากหลาย ในการเก็บข้อมูลเพื่อการประมวลผลหาความสัมพันธ์ของข้อมูลที่ได้จากการวัดด้วยเครื่องกับค่าที่ได้จากการวิเคราะห์จริง โดยการออกแบบในส่วนของ chamber ที่ใช้ในการวัด และตำแหน่งของ light source ที่ใช้ในการให้แสงในช่วงเนียร์อินฟราเรด รวมถึงการวางตำแหน่งของ detector ที่ใช้ในการสร้าง (ภาพที่ 2)
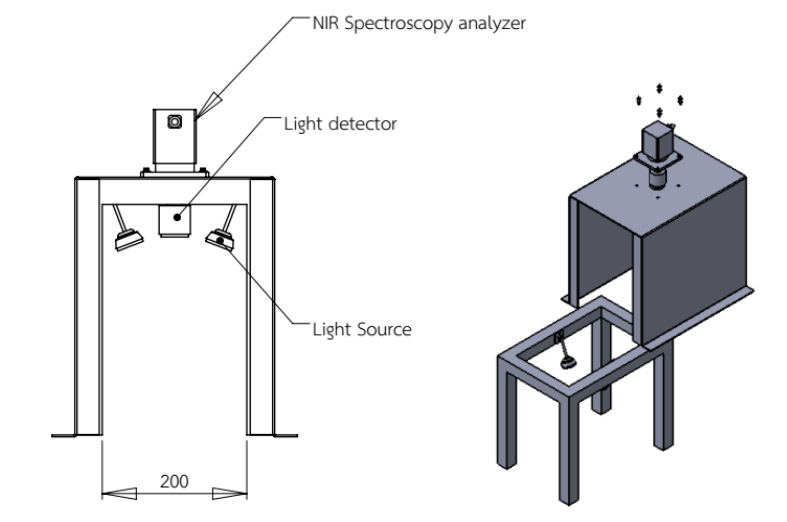
การออกแบบชุดประเมินคุณภาพผลิตผลโดยใช้เทคนิคเนียร์อินฟราเรดสเปกโทรสโกปี ออกแบบให้มีลักษณะเป็นอุโมงค์ยาว 500 มม สูง 450 มม กว้าง 330 มม วางครอบอยู่บนสายพานชุดต้นแบบเพื่อเก็บข้อมูลสเปกตรัม โดยโครงของอุโมงค์ที่ใช้ในการสร้างเครื่องต้นแบบนั้นจะใช้วัสดุอลูมิเนียมโพรไฟล์เพื่อความสะดวกในการติดตั้งชุดตรวจวัด ซึ่งประกอบด้วยอุปกรณ์ดังนี้
- แหล่งกำเนิดแสง
- ตัวรับแสง
- สาย fiber optic ที่มีความแม่นยำสูง
- Spectroscopy analyzer
- หัววัดแบบ fiber optic
- ชุดจับวางอุปกรณ์ประกอบ
- ชุดควบคุมการทำงานของเครื่องวัด
- ชุดตรวจวัดทั้งหมดออกแบบให้สามารถปรับเปลี่ยนระยะได้โดยง่าย
เพื่อให้สามารถสะดวกต่อการใช้งานและสามารถปรับปรุงให้มีประสิทธิภาพมากยิ่งขึ้น ในการเก็บข้อมูลสเปกตรัม ของชุดต้นแบบในการวัดเนียร์อินฟราเรด และให้สามารถนำไปประยุกต์ใช้ได้กับการออกแบบในระบบสายพานจริง
2.การออกแบบและพัฒนาชุดคัดแยกแบบสายพาน (Sorting line)
การออกแบบและพัฒนาชุดคัดแยกสายพานลำเลียงโดยการสร้างระบบคัดแยกคุณภาพผลผลิตต้นแบบ ซึ่งประกอบด้วยส่วนต่างๆ ดังนี้
1.1. ภาชนะบรรจุผลผลิต (container)
1.2. ระบบลำเลียง (conveyor system)
1.3. ระบบกลไกที่เกี่ยวข้องกับการทำงานของชุด NIRS (controlling unit)
1.4. กลไกการลำเลียงผลิตผลที่ผ่านการตรวจสอบคุณภาพแล้ว (separating unit)
1.5. โปรแกรมควบคุมการทำงาน (software)
โดยการออกแบบให้มีลักษณะเป็นอุโมงค์ยาว 500 มม สูง 450 มม กว้าง 330 มม วางครอบอยู่บนสายพานชุดต้นแบบเพื่อเก็บข้อมูลสเปกตรัม โดยโครงของอุโมงค์ที่ใช้ในการสร้างเครื่องต้นแบบนั้นจะใช้วัสดุอลูมิเนียมโพรไฟล์เพื่อความสะดวกในการติดตั้งชุดตรวจวัด โดยการออกแบบการเก็บสเปกตรัมในระบบ interactance และสามารถปรับเป็น reflectance ได้ เพื่อให้สามารถใช้งานได้หลากหลาย ในการเก็บข้อมูลเพื่อการประมวลผลหาความสัมพันธ์ของข้อมูลที่ได้จากการวัดด้วยเครื่องกับค่าที่ได้จากการวิเคราะห์จริง (ภาพที่ 3)
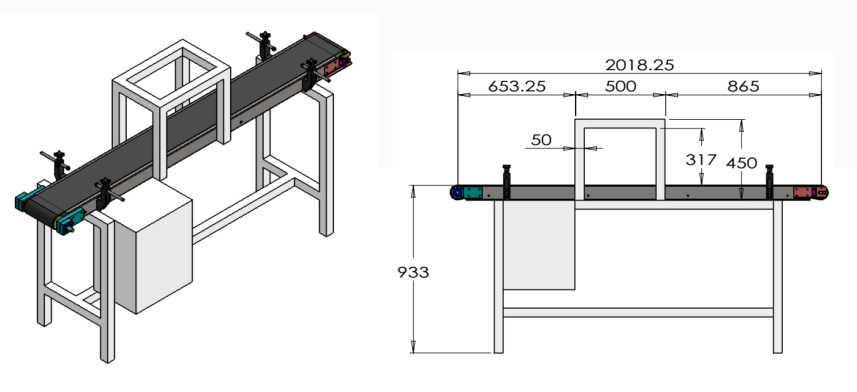
ชุดคัดแยกแบบสายพาน (Sorting line) ที่ออกแบบและพัฒนาขึ้นเพื่อจัดทำระบบคัดแยกคุณภาพผลผลิตต้นแบบ ซึ่งประกอบด้วยส่วนต่างๆ ดังนี้
- โครงสร้างหลักเป็น Stainless steel 304 ขนาดความยาวโดยรวม 2018 มม เมตร สูง 933 มม เพื่อความสะดวกในการปฎิบัติงาน
- สายพาน เป็น PVC ผิวเรียบ สีดำ กว้าง 200 มม หนา 2 มม
- มีราวกั้นข้างตลอดความยาวสายพานที่สามารถปรับระยะความกว้างให้เหมาะสมกับผลผลิตที่ต้องการวัดได้
- ลูกกลิ้งขับและลูกกลิ้งตาม เป็นอลูมิเนียม เส้นผ่านศูนย์กลาง 76 มม
- มอเตอร์ไฟฟ้าต้นกำลังขับสายพานเป็นเกียร์มอเตอร์อัตราทด 1:100 ขนาดกำลัง ¼ แรงม้า ระดับแรงดันไฟฟ้า 380 โวลต์
- ความเร็วของสายพานให้อยู่ในช่วง 1-10 มม ต่อวินาที โดยควบคุมผ่าน Inverter
- การควบคุมการทำงานของสายพานใช้ชุด PLC (Programmable logic controller) เพื่อความยืดหยุ่นในการทำงานร่วมกับชุดประเมินคุณภาพ
- ใช้ Photoelectric sensor ในการตรวจสอบการเคลื่อนที่ของผลผลิต โดยทำงานร่วมกับ Timer และ Inverter
- ตู้ควบคุมระบบไฟฟ้าจะติดตั้งอยู่กับโครงสร้างสายพาน ตู้ควบคุมนอกจากจะติดตั้งชุดตัดต่อระบบไฟฟ้าหลักและชุดควบคุมแล้ว ยังจ่ายไฟกระแสตรง 5 โวลต์ และ 12 โวลต์ เพื่อใช้กับชุดประเมินคุณภาพ
- ขนาดส้ม เส้นผ่านศูนย์กลาง ประมาณ 6.5 มม ดังนั้น ขนาดสายพาน กว้าง 20 mm เพื่อความสะดวกในการติดตั้งชุดหัววัด
- สายพาน pvc สีดำ ความยาวสายพานรวม 2 เมตร สูงรวม 1 เมตร
- โครงทำจากอลูมิเนียมโพรไฟล์ขนาด 60*60 มม เฉพาะส่วน
- ขนาดลูกกลิ้ง 55 mm ทำจากเพลาอลูมิเนียม 3² กลึงขึ้นรูป
- มอเตอร์เกียร์ปรับความเร็วรอบได้ ขนาด 1/8 แรงม้า
- ความเร็วสายพานอยู่ในช่วง 1 มม/วินาที – 10 มม/วินาที
- มีชุดควบคุมความเร็วมอเตอร์
- มีเซ็นเซอร์ (proximity) ตรวจจับผลส้ม เมื่อมีผลส้มเคลื่อนที่ผ่าน ให้หยุดสายพานตามเวลาที่ตั้งค่าไว้ก่อนที่จะเคลื่อนที่ต่อไป **ใช้ในกรณีที่ต้องหยุดสายพาน
- ตู้ควบคุมนอกจากมี circuit breaker, สวิทช์ปิด เปิด, timer สำหรับตั้งเวลาในการหยุดสายพาน และชุดควบคุม ความเร็วสายพานแล้ว จะมีหม้อแปลง จ่ายไฟ DC 5 V และ 12 V สำหรับใช้กับเครื่องวัด NIR และหลอดไฟ ประกอบด้วย connector banana socket สำหรับไฟ 12 V เป็น ปลั๊กเสียบ + – จำนวน 1 จุด connector banana socket สำหรับไฟ 5 V เป็น ปลั๊กเสียบ + – จำนวน 1 จุด และ connector USB สำหรับไฟ 5 V เป็น จำนวน 2 ช่อง
3.พัฒนาโปรแกรมสำหรับควบคุมการทำงานของเครื่องต้นแบบชุดตรวจวัด (NIR prototype)
โดยการพัฒนาโปรแกรมสำหรับชุดควบคุมเครื่อง NIRs โดยการเชื่อมต่อระหว่างชุด DLP NIRscan Nano เข้ากับ Raspberry PI3 โดยการใช้คำสั่ง UART จากนั้น เขียนโค้ดเพื่อป้อนข้อมูลโดยใช้โปรแกรม ภาษา Python เพื่อสร้างแฟ้มรหัสที่มีชื่อว่า trigger.py เพื่อเป็นรหัสต้นฉบับในการคัดแยกผลส้ม จากนั้น ออกแบบหน้าจอแสดงผลในคอมพิวเตอร์ให้มีลักษณะที่ใช้งานง่าย เข้าใจง่าย มีการแสดงสัดส่วน และแสดงผลค่าสเปกตรัมของตัวอย่าง
การพัฒนาโปรแกรมสำหรับควบคุมเครื่อง NIRs เริ่มจากการเชื่อมต่อสัญญาณ จากชุดอ่านและวิเคราะห์คลื่นแสงช่วงเนียร์อินฟราเรด DLP NIRscan Nano เข้ากับ Raspberry PI 3 โดย DLP NIRscan Nano สื่อสารโดยใช้ UART (Universal Asynchronous Receive and Transmit) ผ่านทางพิน 3 และ พิน 4 ของตัวเชื่อมต่อการขยายตัว J3 บนไมโครโปรเซสเซอร์บอร์ดเพื่อแลกเปลี่ยนคำสั่งและข้อมูลกับโฮสต์ตัวประมวลผลหรือพีซี คำสั่ง UART เป็นแพ็กเก็ตข้อมูลความยาวผันแปรที่ส่งด้วยไบต์ที่มีนัยสำคัญน้อยที่สุดก่อน ความยาวของแพ็กเก็ต UART สูงสุดคือ 64 ไบต์ แพ็กเก็ต UART ใช้การกำหนดค่าอนุกรมต่อไปนี้:
•บิตต่อวินาที: 115200
•บิตข้อมูล: 8
•พาริตี้: ไม่มี
•หยุดบิต: 1
•การควบคุมการไหล: ไม่มี
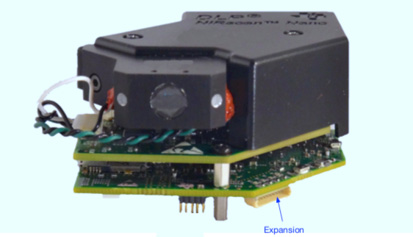
โดยใช้ Raspberry Pi บอร์ดคอมพิวเตอร์ขนาดเล็ก (Single-Board Computer หรือ SBC) ที่ถูกพัฒนาขึ้นโดย Raspberry Pi Foundation มีคุณสมบัติเด่นเป็นอุปกรณ์ขนาดเล็กที่สามารถติดต่อ และความคุมอุปกรณ์อิเล็กทรอนิกส์ได้ สำหรับในโครงการนี้เลือกใช้ Raspberry Pi 3 Model B ดังแสดงในภาพที่ 5

การควบคุมอุปกรณ์อิเล็กทรอนิกส์
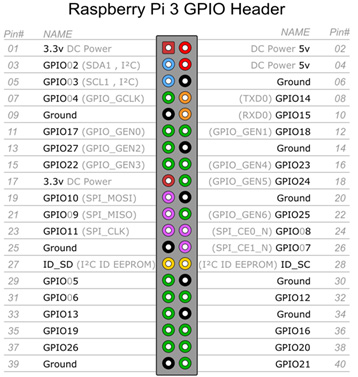
บนบอร์ด Raspberry Pi 3 จะมีส่วนที่เรียกว่า GPIO (General Purpose Input-Output) เป็นส่วนที่เอาไว้ต่อสัญญาณ Input/Output เข้ากับวงจรอิเล็กทรอนิกส์ภายนอกได้ ดังในภาพที่ 6
การรับ/ส่งสัญญาณ Input/Output ผ่าน GPIO เขียนโปรแกรมสั่งงานด้วยภาษาที่นิยมใช้กันทั่วไป คือ Python โดยรูปแบบหนึ่งของสัญญาณที่ใช้รับ/ส่งจะอยู่รูปแบบของแรงดันไฟฟ้า 0 V กับ 3.3 V ตัวอย่าง เช่น : เมื่อ GPIO ขา X ได้รับไฟ 0 V (หรือไม่ถูกจ่ายไฟ) >> โปรแกรมจะได้รับสัญญาณเป็น 0 หรือ False เมื่อ GPIO ขา X ได้รับไฟ 3.3 V >> โปรแกรมจะได้รับสัญญาณเป็น 1 หรือ True เมื่อโปรแกรมส่งสัญญาณออกไปเป็น 0 หรือ False >> GPIO ขา X จะจ่ายไฟ 0 V (หรือไม่จ่ายไฟ) เมื่อโปรแกรมส่งสัญญาณออกไปเป็น 1 หรือ True >> GPIO ขา X จะจ่ายไฟ 3.3 V
ผลจากการจำลอง ค่าที่ได้จากการอ่าน จะมีรูปแบบการแสดงผลในหน้าจอ (Monitor Screen) ดังภาพที่ 7 และภาพที่ 8 เพื่อแสดงผลการตรวจประเมินคุณภาพผลิตผลเพื่อนำไปแสดงผลในหน้าจอคอมพิวเตอร์ต่อไป


บทความนี้ตีพิมพ์ลงใน Postharvest Newsletter ปีที่ 19 ฉบับที่ 2 เมษายน – มิถุนายน 2563


